


 Yeni Kayıt
Yeni Kayıt







 Konudaki Resimler
Konudaki Resimler



|


 kullanıcısına yanıt
kullanıcısına yanıt
 kullanıcısına yanıt
kullanıcısına yanıt
 kullanıcısına yanıt
kullanıcısına yanıt
 kullanıcısına yanıt
kullanıcısına yanıt




















Bildirim


 Samsung Galaxy S25: Yapay Zeka Parmaklarınızın Ucunda
https://www.amazon.com.tr/stores/page/92F263DE-74F5-45CA-B8EE-2FA578898A76?ref_=s25dh
Samsung Galaxy S25: Yapay Zeka Parmaklarınızın Ucunda
https://www.amazon.com.tr/stores/page/92F263DE-74F5-45CA-B8EE-2FA578898A76?ref_=s25dh

 Spigen U100 Universal Metal Kick Stand Tüm Cihazlarla Uyumlu (Video ve Oyun Ayağı) Black - 000EM20860 : Amazon.com.tr: Elektronik
https://www.amazon.com.tr/gp/product/B01LW6NN8T
5 sa. önce paylaşıldı
Lepro LED el feneri LE2050 ultra parlak LED el feneri, klipsli, yakınlaştırılabilir kamp el lambası, 5 modlu, su geçirmez el feneri, kamp, dış mekan, doğa yürüyüşü, balık tutma, hediye, 2'li paket : Amazon.com.tr: Yapı Market
https://www.amazon.com.tr/dp/B0932X7YH6?ref=ppx_yo2ov_dt_b_fed_asin_title
15 sa. önce paylaşıldı
Spigen U100 Universal Metal Kick Stand Tüm Cihazlarla Uyumlu (Video ve Oyun Ayağı) Black - 000EM20860 : Amazon.com.tr: Elektronik
https://www.amazon.com.tr/gp/product/B01LW6NN8T
5 sa. önce paylaşıldı
Lepro LED el feneri LE2050 ultra parlak LED el feneri, klipsli, yakınlaştırılabilir kamp el lambası, 5 modlu, su geçirmez el feneri, kamp, dış mekan, doğa yürüyüşü, balık tutma, hediye, 2'li paket : Amazon.com.tr: Yapı Market
https://www.amazon.com.tr/dp/B0932X7YH6?ref=ppx_yo2ov_dt_b_fed_asin_title
15 sa. önce paylaşıldı




|
Ya bizim millete iyonize olan ve olmayan radyasyonu bir türlü öğretemedik. Kardeşim sen baz istasyonu da bizi kanser yapıyor sanıyorsundur
|
|
Abd GPS gibi stratejik bilgi sunan ve global çapta kullanılan herhangi bir program veya uygulamanın başka bir ülkenin tekelinde olmasına, bilgi toplamasına asla izin vermez. Her türlü çomağı sokar, yeterli algı ve mali operasyonlarla bu gibi gelişmelerin global çapta yer edinmesine/kullanılmasına engel olur.
|
|
Sen geceleri yatmadan telefonunu başka odaya da koyuyorsundur |
|
GPS, Telsiz, Radyo vs. iyonize edici olmayan radyasyon (radyo dalgaları, kızılötesi ışınlar) kullanıyor ki bunların kanser vs. gibi sağlık sorunları oluşturduğuna dair pek bir kanıt yok, hatta oluşturmadığına dair birçok kanıt var Bu sistem kendi başına radyasyon üretmiyor, varolan kozmik radyasyonu kullanıyor. Edit: Öncelikle özür diliyorum, iyonize olmayan radyasyonların hücreye aşırı kalsiyum girişine sebep olduğuna dair çalışmalar varmış. Aşağıda @Torlak Kemal 'in attığı yoruma bakabilirsiniz. |
|
E doktorlar, uzmanlar, tıp profesörleri hatta fizikçiler çıkıyor elektromanyetik radyasyon, 5G, wifi, mikrodalga fln kanser yapıyor diyor millet ne yapsın? Ne bilsin sade vatandaş radyasyon iyonize mi değil mi diye, daha koca koca profesörler öğrenemedi...
|
< Bu ileti iOS uygulamasından atıldı > |
< Bu ileti Android uygulamasından atıldı > |
< Bu ileti Android uygulamasından atıldı > |
|
no prob |
|
|
GPS, Telsiz, Radyo vs. iyonize edici olmayan radyasyon (radyo dalgaları, kızılötesi ışınlar) kullanıyor ki bunların kanser vs. gibi sağlık sorunları oluşturduğuna dair pek bir kanıt yok, hatta oluşturmadığına dair birçok kanıt var Bu sistem kendi başına radyasyon üretmiyor, varolan kozmik radyasyonu kullanıyor. Edit: Öncelikle özür diliyorum, iyonize olmayan radyasyonların hücreye aşırı kalsiyum girişine sebep olduğuna dair çalışmalar varmış. Aşağıda @Torlak Kemal 'in attığı yoruma bakabilirsiniz. < Bu mesaj bu kişi tarafından değiştirildi Blitz. -- 20 Haziran 2023; 15:40:19 > |
< Bu ileti Android uygulamasından atıldı > |
|
Sen geceleri yatmadan telefonunu başka odaya da koyuyorsundur |
|
< Bu ileti Android uygulamasından atıldı > |
< Bu ileti Android uygulamasından atıldı > |
|
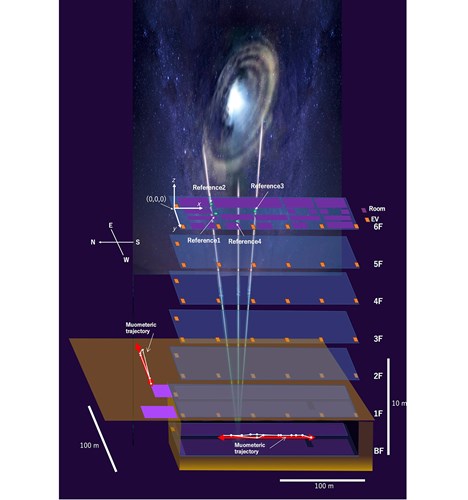
Konu basit aslında Hiroyuki K.M. Tanaka herşeyi anlatmış burada. Prensip muPS'nin prensibi basittir. Alıcı dedektörünün üç boyutlu konumu , GPS için de kullanılan Denklem 1 çözülerek elde edilebilir ( Şekil 1 A). Denklem 1'i çözme koşulu, dört parametrenin (x, y, z ve t) tümünde beklenen değerlerin bu dört denklem arasında aynı olması gerektiği varsayımını gerektirir; aksi takdirde Denklem 1'deki dört katlı denklemlertutmayın. Bu varsayım yalnızca x, y, z ve t'nin dört müon izini toplamak için gereken süre içinde önemli ölçüde değişmediği durumlarda mantıklıdır. Bununla birlikte, GPS sinyallerinden farklı olarak, kozmik ışın müonları uzay-zamansal olarak dağıldığı için, bu müonlar referans detektörlerine ve alıcı detektörüne ara sıra gelirler, yani tüm referans detektörlerine ve alıcı detektörüne aynı anda ulaşmazlar. Hem referans dedektörü hem de alıcı dedektörü tarafından tespit edilen müonların sayısı (N), referans ve alıcı dedektörleri tarafından oluşturulan katı açının (Ω) bir fonksiyonudur. Küçük dedektörlerin alanı (dS) ve referans ile alıcı dedektörler arasındaki mesafe (L i ) verilirse, küçük katı açı (dΩ) ( Şekil 1 B) şu şekilde tahmin edilir: d Ω ∼dS _L Ben L Ben - 2 Fveya rd S ≪L Ben L Ben 2 (Denklem 2)
Bu nedenle, muPS için gereken minimum müon izi sayısını (dört müon izi) toplamak için gereken süre (t min ) şu şekilde olacaktır: t min -1 =kI μ L ben 3 D -2 (Denklem 3)
burada I μ açık gökyüzü müon akısıdır ve k müonun alıcı detektöre ulaşmadan önce madde yoluyla iletilmesinden kaynaklanan azaltma faktörüdür, bu şu şekilde verilir: k = [∫ ∞ e c ben ( E , θ ) d E ][∫ ∞ 0 ben ( E , θ ) d E ] - 1 (Denklem 4)
Örneğin, referans dedektörlerin ve alıcı dedektörün boyutlarının tümü 1 m 2 ise ve bu dedektörler arasındaki mesafe 30 m ise, o zaman t min 10 s olacaktır. Navigasyon yürüme hızında (1 ms −1 ) hareket ederse, bu kez çözünürlük (10 s) 10 m'lik bir konumlandırma doğruluğu üretir; tersine, yerel saat 10 saniye içinde 100 ns dalgalanırsa, bu titreşim 30 m'lik bir konumlandırma belirsizliği oluşturur. Müon varış frekansı ile ilişkili bu hatayı bastırmak için, navigasyonun hızı, normal yürüme hızının yarısı (0,5 ms -1) olacak şekilde ayarlandı.) ve referans dedektörlerin yerleri için altıncı kat seçilmiştir. Altıncı kata dört referans dedektör yerleştirildi ( Şekil 1 A'da yeşille dolu daireler) ve her biri sırasıyla birinci, ikinci, üçüncü ve dördüncü referans dedektörleri olarak etiketlendi (bkz. Şekil 1 A'daki referans 1-4'ün konfigürasyonu ) . Bodrum katı ile alıcı dedektör arasındaki dikey yer değiştirme 24 m ve zemin seviyesi ile alıcı dedektör arasındaki dikey yer değiştirme 20 m olmuştur. MuWNS Mevcut MuWNS aşağıdaki bileşenlerden oluşur: dedektör, büyük ana saat (GMC) (Trimble Thunderbolt PTP GM200), ve ilişkili elektronikler. Mevcut navigasyon sisteminin bir blok diyagramı Şekil 2'de gösterilmektedir . Dedektör sistemini 4 adet referans dedektörü ve 1 adet alıcı dedektörü oluşturmaktadır ve dedektörlerin her biri 1×1m 2 boyutundadır.2 cm kalınlığında kare şekilli plastik sintilatörler ve akrilik bir ışık kılavuz ünitesi aracılığıyla her dedektörün her bir köşesine bağlanan fotoçoğaltıcı tüpler (PMT'ler) (Hamamatsu R7724). PMT'nin karanlık akımından kaynaklanan tesadüfi çakışma oranını azaltmak için alıcı dedektörüne yedekli bir PMT takılır. GMC bileşeni, müonun referans dedektörleri ile alıcı dedektörü arasındaki uçuş süresinin (TOF) ölçümleri için kullanılan iki GMC'den (GMC1 ve GMC2) oluşur. GMC1, referans dedektörleri ile ilişkilidir ve GMC2, alıcı dedektörü ile ilişkilidir. Her bir GMC, bir GPS/GNSS alıcısından (çok takımyıldızlı GPS/GLONASS/Beidou/Galileo/QZSS) ve kayma ayarlama işlevine ve tutma işlevine sahip bir OCXO'dan (Trimble OCXO) oluşur.Şekil 2 A). Bu veriler, GMC GPS anteninden kesildiğinde zamanlama doğruluğunu "tutmak" için kullanılabilir. Bu nedenle, GMC GPS anteni modunda ne kadar uzun süre çalışabilirse, artık bağlı olmadığında zaman doğruluğu o kadar iyi olur. Şekil 3, tutma modunda GPS anteninden kesme aşamasından sonraki zamanın bir fonksiyonu olarak zamana bağlı GMC'nin sürüklenme seviyesini gösterir (bu verileri toplamak için kullanılan deney düzeneği için Yöntem bölümüne bakın). İlgili elektronik parçalar, yüksek voltajlı (HV) beslemelerden, ayırıcılardan, ölçekleyici elektroniklerden ve dijital dönüştürücüye (TDC) zamandan oluşur. Mevcut TDC zaman çözünürlüğü 27 ps'dir. Referans dedektörlerin ve alıcı dedektörün tek sayım oranlarının tümü ∼10 2 idiHz. HV, PMT'lere uygulanır ve PMT çıktılarını ikili hale getirmek için ayırıcılar kullanılır. Ölçekleyici elektroniğin amacı, GMC'den çıkan darbelerin sayısını saymaktır ve TDC, müon varış zamanı ile GMC darbe çıkışlarının zamanlaması arasındaki zaman farkını ölçer. Daha spesifik olarak, GMC darbeleri, nT'nin değerini ölçmek ve çıkarmak için ölçekleyici elektroniğe beslenir; burada n, ölçümün başlamasından sonra sayılan GMC darbelerinin sayısıdır ve T, GMC darbelerinin periyodudur. GMC darbeleri ayrıca bir çıkış devresi ile başlangıç sinyali olarak TDC'ye bölünür. Ayrımlı PMT sinyalleri, Δt çıkışına durma sinyali olarak TDC'ye beslenir; burada Δt, TDC'ye beslenen başlatma ve durdurma sinyalleri arasındaki zaman kaymasıdır. Ölçekleyici verileri ve TDC verileri, bu verileri birleştirmek için sahada programlanabilir bir geçit dizisine (FPGA) aktarılır. Sonuç olarak, ortaya çıkan nT + Δt müonun dedektörlere ulaştığı zamanı gösterir, burada sıfır (bir zaman birimi olarak) TDC'nin sıfırlama süresi ile tanımlanır. TDC'nin sıfırlanması gerekliliği aşağıdaki şekilde açıklanmaktadır. GMC'ler GPS antenlerine bağlı olsalar bile, iki bağımsız GMC aynı zamanları vermezŞekil 3 ). Bu nedenle, zaman çizelgesinde GMC1 ve GMC2'yi senkronize etmek için GMC puls çıkışlarını "sıfır zaman" olarak etiketlemek gerekir, böylece bu iki GMC ile aynı zaman paylaşılır. Bunu yapmak için, aynı anda GMC darbelerinin sayısını saymaya başlayabilmeleri için GMC-TDC'de birikmiş verileri temizlemek üzere iki ölçekleyici elektroniğine aynı anda bir sıfırlama sinyali gönderilir. FPGA çıkış verileri, (nT + Δt) REFERANS ve (nT + Δt) ALICI karşılaştırılabilmesi için referans dedektörlere ve alıcı dedektöre bağlı yerel PC'lere aktarılır . Trimble Thunderbolt PTP GM200 referans kılavuzunda, saatin GPS antenine birkaç saatten fazla bağlanması önerildi. Ancak, Şekil 3'te gösterildiği gibi, ölçüm sonucu, burada tartıştığımız zaman ölçeğinde (2.000 s) bağlantı süresi ile kayma seviyesi arasında bir ilişki olmadığını gösterdi. Bu zamana bağlı OCXO'nun sürüklenme seviyesinin ölçümleri aşağıdaki şekilde yapılmıştır. Bir GPS antenine (OCXO1) bağlı OCXO'dan ve bir GPS anteninden (OCXO2) bağlantısı kesilmiş OCXO'dan gelen PPS sinyallerinin her ikisi de, başlangıç ve bitiş sinyalleri olarak TDC'ye (Sciosence TDC-GPX) aktarılmak üzere NIM seviyesine dönüştürüldü. , sırasıyla. Hem pozitif hem de negatif sapmalar beklendiği için OCXO2 ile TDC arasına bir gecikme devresi yerleştirildi. TDC'den gelen sinyaller bir CPLD'ye aktarıldı ve ardından Ethernet yoluyla yerel PC ile iletişim için Raspberry Pi'ye aktarıldı. TDC'nin ölçülebilir zaman aralığı, 27 ps çözünürlükle 10 us idi, Şekil 3 GPS anteninden ayrılmadan önce farklı bağlantı süreleri için zamana bağlı OCXO kayma seviyesi: A, 48 sa, B, 72 sa, C, 10 dak, D, 0,5 sa, E, 0 sa (anten bağlantısı yok), F , 16 sa, G, 8,5 sa, H, 16 sa ve I, 1 sa Mevcut ölçümlerde, kayma seviyesini mümkün olduğu kadar bastırmak için muometrik ölçümden önce GMC1 sürekli olarak GPS antenine ve GMC2 GPS antenlerine 1 saatten fazla bağlanır. Mevcut muometrik ölçümün prosedürü şu şekilde özetlenebilir: (1) GMC1 ve GMC2, GPS antenlerine bağlıdır. (2) Navigasyondan hemen önce, GMC2'nin GPS antenlerinden bağlantısı kesilir. (3) Muometrik ölçümler tamamlandıktan sonra GMC2 tekrar GNSS antenlerine bağlanır. (2)-(3) işlemleri bu çalışmada tekrarlanmıştır. (2)-(3) işlemleri için gereken süre 30 dakika olup, mevcut MuWNS bir dizüstü bilgisayara güç sağlamak için kullanılan 12-V pillerle çalıştırılmıştır. deneysel konfigürasyon Bu deneyde MuWNS tarafından yönlendirilecek olan özne bir insandı (burada bir navigasyon olarak etiketlenmiştir). Navigasyon ilk önce alıcı dedektörünü ikinci katta bulunan ikinci referans dedektörünün altına yerleştirdi ( Şekil 1 A). Daha sonra navigasyon, muPS alıcı dedektörünü tuttu ve bir asansör kullanarak bodrum katına taşındı. Sınırlı yataya yakın müon akışı ve sonuçta ortaya çıkan daha küçük etkili alan nedeniyle, altıncı kat ile bodrum kat arasında navigasyon gerçekleştirilmedi. İlk ölçüm aşamasında, navigasyon, bodrum katının koridoru boyunca binanın kuzeyinden güney taraflarına gitti ve daha sonra binanın güneyinden kuzey taraflarına geri gitti (Şekil 1'deki kırmızı ok) .). Daha sonra, gezgin altıncı kata geri geldi ve alınan verilerin düzeltilmesi için alıcının saatinin kayma seviyesini hesaplamak üzere ölçümlerin başlangıcı ile sonu arasındaki sürüklenme seviyesini ölçmek için referans dedektörü tekrar ikinci referans dedektörünün altına yerleştirdi. . İkinci ölçüm aşamasında, navigasyon doğudan batıya gitti. İkinci ölçüm aşamasının sonuçları daha sonra açıklanacaktır. Bu ölçümün tüm süreci için gereken süre (bir gidiş-dönüş) 30 dakika içindeydi. Şekil 2'de görülebileceği gibi , GMC'nin GNSS anteninden ayrılmasından sonraki 30 dakika içinde frekans kaymasının zamanın doğrusal bir fonksiyonu olarak var olduğunu varsaymak makul olduğundan, navigasyon sırasındaki frekans kayması, kayma seviyesinin enterpolasyonuyla tahmin edilmiştir. Ölçümlerin başlangıcı ve bitişi arasında. (x, y, z) = (0, 0, 0) koordinatının orijin konumu, Şekil 1'de gösterildiği gibi binanın altıncı katında alınmıştır . Navigasyonun gerçek yolu, Şekil 1'de kırmızı oklarla gösterilmiştir.ve mevcut çalışmadaki muometrik olarak belirlenen yol mavi ve beyaz çizgilerle gösterilir. Bu çizimde, muometrik yolun yeniden oluşturulması için dikey yer değiştirme (z) 0 m ve -24 m olarak sabitlendi. Sonuçlarla ilgili daha ayrıntılı açıklamalar aşağıdaki bölümlerde açıklanacaktır. Navigasyon sonuçları GPS disiplinli saate bağlı olan ikinci referans detektörü ( Şekil l' deki referans 2), navigasyondan önce ve navigasyondan sonra alıcı detektörün kalibrasyonu için kullanıldı. Alıcı detektörü ile ilişkili yerel saat saptığından, navigasyon sırasında üretilen zaman ofseti, navigasyondan önceki ve sonraki GPS disiplinli saat karşılaştırılarak tahmin edildi. Şekil 4başlangıç konumundaki müonların TOF'unu gösterir. Bu şekilden, mevcut navigasyon sisteminin zamanlamasındaki kısa vadeli (~10 s) titreşim seviyesi tahmin edilebilir ve sonuçlar ∼5 ns (1 standart sapma [SD]) ve ±15 ns (tepeden tepeye) olmuştur. ). Bu titreşimi oluşturan en baskın faktör, OCXO'nun frekansındaki dalgalanmalardan kaynaklanır. En baskın ikinci faktör, müonların sintilatöre çarptığı yerdeki dalgalanmalardan gelir (tepeden tepeye ±3 ns). İkinci referans detektörü ile alıcı detektörü arasındaki mesafe 50 cm idi; bu nedenle, Şekil 4 A'da TOF için beklenen ortalama değer ~1,5 ns'dir ve bu, mevcut sistemin titremesinden yeterince küçüktür. |
< Bu ileti Android uygulamasından atıldı > |
< Bu ileti Android uygulamasından atıldı > |
< Bu ileti Android uygulamasından atıldı > |
|
|
Aslında konu biraz kazık. Hangi müonlara nasıl bir işaret koyuyorlar yada onların seçildiğini gösteriyorlar hala anlayamadım. Ayrıca hareket hızı çok düşük. 24 metreyi 15 dakikada yürümek lazım. Orjinal adres aşağıda. |
|
Her önüne gelen profluk verilen ülkede şaşırmamak lazım hocam kalite düştü kazara prof falan olucam diye korkuyorum artık |
|

