dönem projesi olarak top izleyen robot projesi aldım.Kameradan alınan görüntünün binary hale çevrilmesinden sonra kenar tespitlerinin yapılması konusunda takıldım.Kendi kodumu da koyuyorm.Sizin bu algoritma hakkındaki düşüncelerinizi de merak ediyorum.Kodu derlediğimde x3,y4 bulunmuyor.Sanırım 2.döngülere hiç giremedği için.Fakat girmemesinin sebebini de anlamadm.
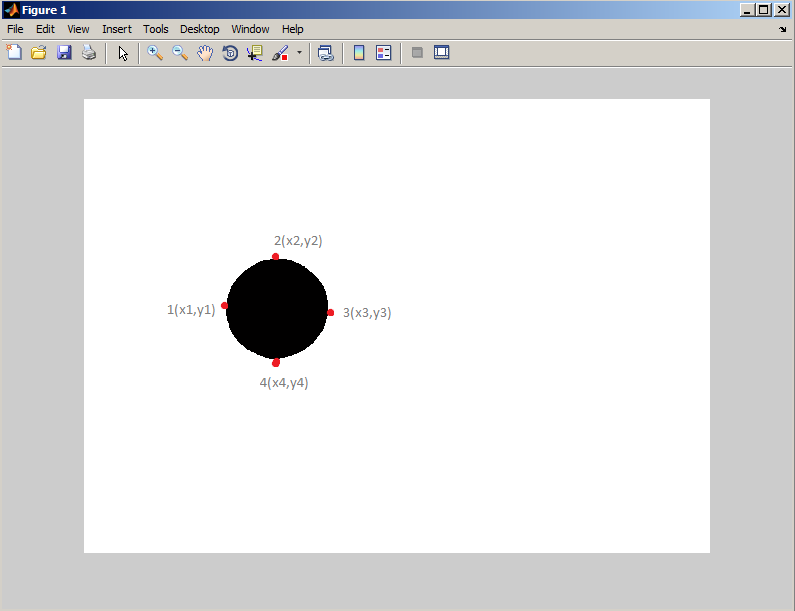
%Resim uzerindeki kose noktalarinin belirlenmesi %Satirlarin sirasiyla taranmasi k=1; for i =1:x for j=1:y if ( k == 1) if (imgebw(i,j) == 1) x1=i; y1=j; k=0; end end if ( k == 0) if (imgebw(i,y1)== 0) x3=i; k=2; end end end end
%Sutunlarin sirasiyla taranmasi t=1; for z=1:y for k=1:x if(t==1) if(imgebw(k,z)==1) x2=k; y2=z; t=0; end end if ( t==0) if(imgebw(x2,z)==0) y4=z; t=2; end end end end



 Yeni Kayıt
Yeni Kayıt










 Konudaki Resimler
Konudaki Resimler