




 Yeni Kayıt
Yeni Kayıt











 Konudaki Resimler
Konudaki Resimler
< Bu mesaj bu kişi tarafından değiştirildi KeanAtay -- 2 Aralık 2013; 1:33:26 > |
PWM Hesabı ve Kodlaması
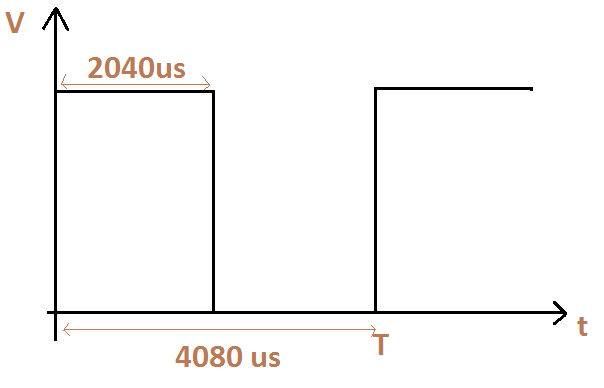
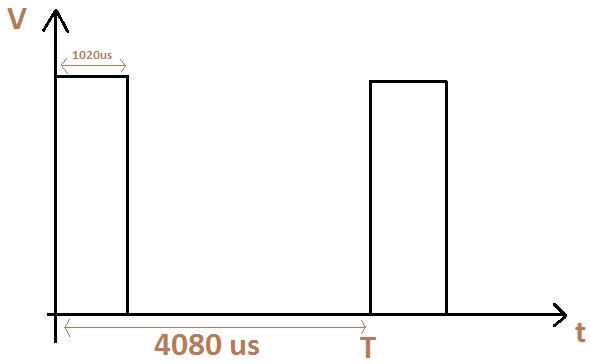
PWM Duty Cycle Nedir?
Darbe Genişlik Modülasyonu (PWM), bir elektrik sinyalinin görev döngüsünü değiştirerek bir çıkış gücünü kontrol etmek için kullanılan bir tekniktir. Görev döngüsü, sinyalin devrede olduğu zamanın toplam süreye oranıdır.
PWM Duty Cycle Hesaplama
PWM görev döngüsü, aşağıdaki formül kullanılarak hesaplanabilir:
Görev Döngüsü = Açık Süre / (Açık Süre + Kapalı Süre)
PWM Hesaplama
PWM hesaplaması, istenen çıkış gücünü elde etmek için gereken görev döngüsünün belirlenmesini içerir. Görev döngüsü genellikle yüzde olarak ifade edilir ve 0 ile 100 arasında değerler alabilir.
PWM Kodlaması
PWM sinyali, bir mikrodenetleyici veya özel bir PWM IC kullanılarak kodlanabilir. Kodlama, açık ve kapalı sürelerin ayarlanmasını ve böylece istenen görev döngüsünün oluşturulmasını içerir.
PWM, motor kontrolü, güç kaynakları ve dijital-analog dönüştürücüler gibi çok çeşitli uygulamalarda kullanılır. Uygun şekilde hesaplanmış ve kodlanmış bir PWM sinyali, hassas ve verimli güç kontrolü sağlayabilir.
 kullanıcısına yanıt
kullanıcısına yanıt
























