




 Yeni Kayıt
Yeni Kayıt













 Konudaki Resimler
Konudaki Resimler
|
İyi akşamlar arkadaşlar. Bir projede takılı kaldım. Yardımcı olursanız çok sevinirim. Kullanmış olduğum kod sıcaklık ve voltaj sensörleri içeriyor. Bu veriKodu leri işleyerek 2x16 ekrana bilgi gönderiyor. Ayrıca fan devreye alıyor. Ve butonlarla menü değişiyor. Kodda bir problem yok. Gayet güzel çalışıyor. Benim istediğim kod verilerini nrf24lo1 kullanarak kablosuz olarak başka bir ardunio ve 2x16 ekrana taşımak. Orjinal kod ekranlı ve verici olacak. Diğer arduino ekranlı ve alıcı olacak. orjinal koddaki sensör girişleri ve ekran çıkış pinlerinin nrf24l01 pinleri ile çakışmaması lazım. Orjinal kodu sizinle paylaşıyorum. Umarım destek olacak bir arkadaş çıkar. Bu arada chatgpt kullandım. Fakat tam istediğim kodu veremedi. Yada ben yalnış yönlendirdim. // PA-Monitor-SG-Lab-2GHz4-V2.ino ---------- c 2020 by DC5ZM ------------------------------------------------------- // // PCB for UNO and NANO are available by weber.r1@t-online.de // // ---------------------------------------------- include libraries -------------------------------------------------- #include <OneWire.h> #include <DallasTemperature.h> #include <LiquidCrystal.h> // ---------------------------------------------- define constants --------------------------------------------------- LiquidCrystal lcd(8, 9, 4, 5, 6, 7); //allocate uno pins to LCD diplay pins(rs,enable,DB4,DB5,DB6,DB7) #define ONE_WIRE_BUS 12 // Data wire is plugged into pin 12 on the Arduino #define TEMPERATURE_PRECISION 13 #define FAN_PIN 11 #define NO 0 #define YES 1 // ************************************************************** variables to be changed for calibration ********* // use https://www.xuru.org/ for calculation coefficients * * // formula used: y = a +b*x + c*x*x * // * float a_drv = -0.087, b_drv = 13.615, c_drv = 61.081; // coefficients of polygon approximation DRV * float a_fwd = 0.491, b_fwd = -1.099, c_fwd = 1.661; // ... FWD * float a_ref = 0.491, b_ref = -1.099, c_ref = 1.661; // ... REF * float scc_drv = 1.0, scc_fwd = 1.0, scc_ref = 1.0; // Shift_Calibration_Curve 0.93=7%> 1.07=7%< * float power_drv_min = 1; // minimal power for calculation and display * byte power_fwd_min = 1, power_ref_min = 1, power_drv_max = 50; // min. power for calc. and display * byte temp_fan_on = 45, voltmeter_full_scale = 30; // fan on at overtemperature, adjust att. R1 * // **************************************************************************************************************** unsigned long time; uint16_t temp_integer; // uint16_t = 16 bit integer char temp_string[8], power_fwd_string[8], power_ref_string[8], power_drv_string[8], swr_string[8]; char pa_voltage_string[8], temp_fan_on_string[8]; float reflexion_coefficient, swr, power_fwd, power_ref, power_drv, voltage_fwd, voltage_ref, voltage_drv; float voltage_fwd_peak = 0, voltage_ref_peak = 0, voltage_drv_peak = 0; float temperature, tmp_old = 0, pa_voltage; byte temp_byte, temp_bar_max = 100, power_drv_int, iii = 0; byte menu = 1, temp_fan_on_marker; boolean fwd_too_low = NO, ref_too_low = NO, fan_active = NO, error_fwd = NO, error_ref = NO, error_swr = NO; OneWire oneWire(ONE_WIRE_BUS); // Setup a oneWire instance to communicate with any OneWire devices DallasTemperature sensors(&oneWire); // Pass oneWire reference to Dallas Temperature // ################################################################################################################### void setup(void) { lcd.begin(16, 2); // display with 16 colum and 2 lines sensors.begin(); // Start up the library pinMode(FAN_PIN, OUTPUT); read_temperature(); lcd.print("PA M O N I T O R"); lcd.setCursor(0, 1); // colum, line nr. delay(500); lcd.print("TR 2024 "); delay(500); lcd.print("by "); delay(500); lcd.print("TA4DC"); delay(1500); lcd.clear(); } // ################################################################################################################### void loop(void) { select_menu(); read_temperature(); } // ################################################################################################################### void select_menu() { if (analogRead(A0) < 1000) menu++; // if any of 5 keys pressed change menu while (analogRead(A0) < 1000) ; // wait for key released if (menu > 3) menu = 1; if (menu == 1) menu_directional_couplers(); if (menu == 2) menu_temperature(); if (menu == 3) menu_supply_fan(); } // ------------------------------------------------------------------------------------------------------------------- void menu_directional_couplers() { for (iii = 0; iii < 20; iii++) // Take 20 samples and save the highest value { voltage_fwd = analogRead(A1); voltage_ref = analogRead(A2); voltage_drv = analogRead(A3); if (voltage_fwd > voltage_fwd_peak) voltage_fwd_peak = voltage_fwd; // safe the peak of 10 measurements if (voltage_ref > voltage_ref_peak) voltage_ref_peak = voltage_ref; if (voltage_drv > voltage_drv_peak) voltage_drv_peak = voltage_drv; } voltage_fwd = voltage_fwd_peak; // use peak voltage for processing voltage_ref = voltage_ref_peak; voltage_drv = voltage_drv_peak; // ---------------------------------------- calculate coupler values ------------------------------------------------- voltage_fwd = voltage_fwd * 5 / 1023 * scc_fwd; // normalize measured value FWD to 5V x scc_fwd voltage_ref = voltage_ref * 5 / 1023 * scc_ref; // ... REF to 5V x scc_ref voltage_drv = voltage_drv * 5 / 1023 * scc_drv; //... DRV to 5V x scc_drv power_fwd = a_fwd + b_fwd * voltage_fwd + c_fwd * voltage_fwd * voltage_fwd; // polygon approximatiion equation fwd if (power_fwd < 0) power_fwd = 0; // avoid negativ values power_ref = a_ref + b_ref * voltage_ref + c_ref * voltage_ref * voltage_ref; // polygon approximatiion equation ref if (power_ref < 0) power_ref = 0; power_drv = a_drv + b_drv * voltage_drv + c_drv * voltage_drv * voltage_drv; // polygon approximatiion equation drv if (power_drv < 0) power_drv = 0; if (power_fwd < power_fwd_min) error_fwd = YES; // check for errors else error_fwd = NO; if (power_ref < power_ref_min) error_ref = YES; else error_ref = NO; if ((power_fwd <= power_ref) || (error_fwd == YES) || (error_ref == YES)) error_swr = YES; else error_swr = NO; display_coupler_values(); voltage_fwd_peak = 0; // set peak voltages back to 0 voltage_ref_peak = 0; voltage_drv_peak = 0; } // ------------------------------------------------------------------------------------------------------------------- void display_coupler_values() { lcd.setCursor(0, 0); lcd.print("FWD W REF W"); lcd.setCursor(4, 0); if (error_fwd == NO) { dtostrf(power_fwd, 2, 0, power_fwd_string); // variable for converting float type numbers lcd.print(power_fwd_string); } else { lcd.print("<"); lcd.print(power_fwd_min); } lcd.setCursor(13, 0); if (error_ref == NO) { dtostrf(power_ref, 2, 0, power_ref_string); // variable for converting float type numbers lcd.print(power_ref_string); } else { lcd.print("<"); lcd.print(power_ref_min); } // .................................................... line 2 of lcd display ...................................... lcd.setCursor(0, 1); lcd.print("DRV mW SWR "); lcd.setCursor(4, 1); if ((power_drv < power_drv_max) && (power_drv >= power_drv_min)) { dtostrf(power_drv, 2, 0, power_drv_string); // variable for converting float type numbers lcd.print(power_drv_string); lcd.setCursor(2, 1); lcd.print("V"); } if (power_drv < power_drv_min) { lcd.setCursor(5, 1); lcd.print(power_drv_min); lcd.setCursor(4, 1); lcd.print("<"); lcd.setCursor(6, 1); lcd.print("mW "); } if (power_drv >= power_drv_max) { lcd.setCursor(4, 1); lcd.print(power_drv_max); lcd.setCursor(3, 1); lcd.print(">"); } if (error_swr == NO) { lcd.setCursor(13, 1); { reflexion_coefficient = sqrt(power_ref / power_fwd); // calculate SWR if (reflexion_coefficient <= 0.8) { swr = (1 + reflexion_coefficient) / (1 - reflexion_coefficient); dtostrf(swr, 2, 1, swr_string); lcd.print(swr_string); // display SWR } else lcd.print(">10"); // SWR too high } } else // display PA temperature { dtostrf(temperature, 2, 0, temp_string); lcd.setCursor(9, 1); lcd.print("TMP \xDF"); lcd.setCursor(13, 1); lcd.print(temp_string); if (fan_active == YES) { lcd.setCursor(15, 1); delay(150); lcd.print(" "); delay(150); } } delay(200); } // ------------------------------------------------------------------------------------------------------------------- void menu_temperature() { dtostrf(temperature, 4, 1, temp_string); // variable for converting float type numbers lcd.setCursor(0, 0); // colum, line nr. lcd.print("PA TEMP.: "); lcd.print(temp_string); lcd.print("\xDF"); // character sign ° lcd.print("C"); // .................................................... line 2 of lcd display ...................................... lcd.setCursor(0, 1); lcd.print("0____________100"); lcd.setCursor(1, 1); if (temperature < 0) temperature = 0; if (temperature > 100) temperature = 100; temp_byte = temperature; temp_byte /= 7.14; // 0 to 100 normalized to0 bis 14 for (iii = 0; iii <= temp_byte; iii++) lcd.print("\xFF"); // \xFF = special character black rectangle if (fan_active == YES) { lcd.setCursor(14, 0); delay(150); lcd.print(" "); delay(150); } delay(250); // delay prevents flickering of the display } // ------------------------------------------------------------------------------------------------------------------- void menu_supply_fan() { pa_voltage = 0; for (iii = 0; iii < 10; iii++) pa_voltage = pa_voltage + analogRead(A4); pa_voltage /= 9; // average of 10 measurements pa_voltage = pa_voltage * voltmeter_full_scale / 1023; // adjust R1 when changing voltmeter_full_scale lcd.setCursor(0, 0); lcd.print("PWR SUPPLY V"); lcd.setCursor(11, 0); dtostrf(pa_voltage, 3, 1, pa_voltage_string); // variable for converting float type numbers lcd.print(pa_voltage_string); // .......................................... line 2 of lcd display ................................................ lcd.setCursor(0, 1); lcd.print("FAN ON TMP >"); dtostrf(temp_fan_on, 2, 0, temp_fan_on_string); // variable for converting float type numbers to strings lcd.print(temp_fan_on_string); lcd.print("\xDF"); lcd.print("C"); if (fan_active == YES) { lcd.setCursor(4, 1); delay(300); lcd.print(" "); delay(300); } // flash word "ON" } // ------------------------------------------------------------------------------------------------------------------- void read_temperature() { if ((millis() - time) > 5000) // The sensor is only read out every 5s { sensors.requestTemperatures(); // because the process takes 750ms temperature = sensors.getTempCByIndex(0); // in high resolution mode. time = millis(); } if (temperature >= temp_fan_on) { digitalWrite(FAN_PIN, HIGH); fan_active = YES; } else { digitalWrite(FAN_PIN, LOW); fan_active = NO; } } // 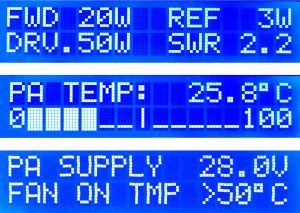   |






















Bildirim

