Bu sefer Robotun Aklını okuyup size aktarmaya çalıştım. Labirent robotumuz labirenti nasıl çözdüğü sadeleştirmeyi nasıl yaparak çıkışın en kısa yolunu hesapladığını anlatmaya çalıştım. Videomu izleyerek “hmm demek böyle yapıyormuş bende bir şey sanmıştım .” diyeceksiniz. Aslında hayatta her şey öğrenene kadar zor öğrenince ise acayip kolaydır. Birde bugün bir videoda ki sözü paylaşmak istedim.



 Yeni Kayıt
Yeni Kayıt









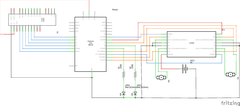
 Konudaki Resimler
Konudaki Resimler