




 Yeni Kayıt
Yeni Kayıt













 Konudaki Resimler
Konudaki Resimler
|
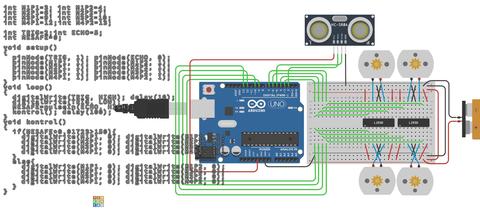
Merhaba arkadaşlar bir projem var bu kulladığım entegrelerdemi sıkıntı var koddamı sıkıntı var çözemedim kod doğru şekilde çalışıyor ama hobi motorları rpm vermiyor kodda mantık hatasıda olabilir ama bulamadım yardımcı olursanız sevinirim iyi günler. 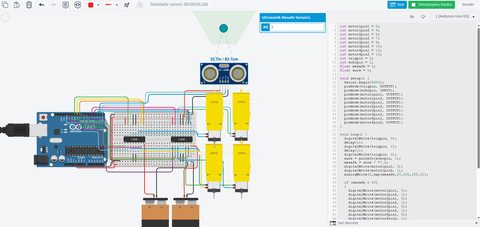 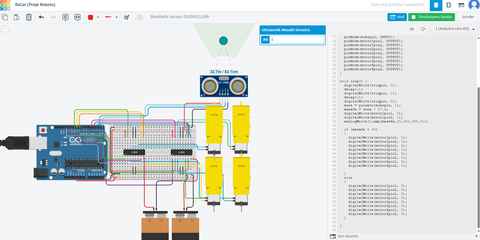 |




















Bildirim

